Die Navier-Stokes-Gleichungen dienen der Beschreibung von viskosen Strömungen. Erfahre in diesem Artikel mehr über die Herleitung dieser Gleichung.
Euler-Gleichung
Im Artikel Herleitung der Euler-Gleichung wurde folgende Gleichung zur Beschreibung der Bewegung von reibungsfreien Strömungen hergeleitet:
\begin{align}
&\boxed{\frac{\partial \vec v}{\partial t} + \left(\vec v \cdot \vec \nabla \right) \vec v + \frac{1}{\rho} \vec \nabla p = \vec g}~~~\text{Euler-Gleichung} \\[5px]
\end{align}
Die Annahme einer reibungsfreien Strömung bedeutet insbesondere die Vernachlässigung der Viskosität von Fluiden. In der Praxis hat jedoch jedes Fluid eine Viskosität (auch ideale Gase!). Diese Viskosität führt zu Reibungskräften innerhalb des Fluids. Die Berücksichtigung der Viskosität in der oberen Euler-Gleichung führt dann schließlich zu der Navier-Stokes-Gleichung.
Normalkräfte auf ein Fluidelement
Für die Herleitung der Navier-Stokes-Gleichungen betrachten wir ein Fluidelement und die hierauf wirkenden Kräfte. Wir beschränken uns dabei zunächst nur auf die Untersuchung der Bewegung in x-Richtung. Die Bewegung des Fluidelements wird zum einen durch die Druckkräfte beeinflusst, die auf die vordere und hintere Fläche wirken. Diese Druckkräfte stellen letztlich Normalspannungen dar und werden im Folgenden mit σ anstelle mit p bezeichnet. Wir werden später nämlich noch sehen, dass neben den Druckkräften weitere (viskositätsbedingte) Kräfte senkrecht auf die Flächen wirken und einen Beitrag zur Normalspannung leisten.
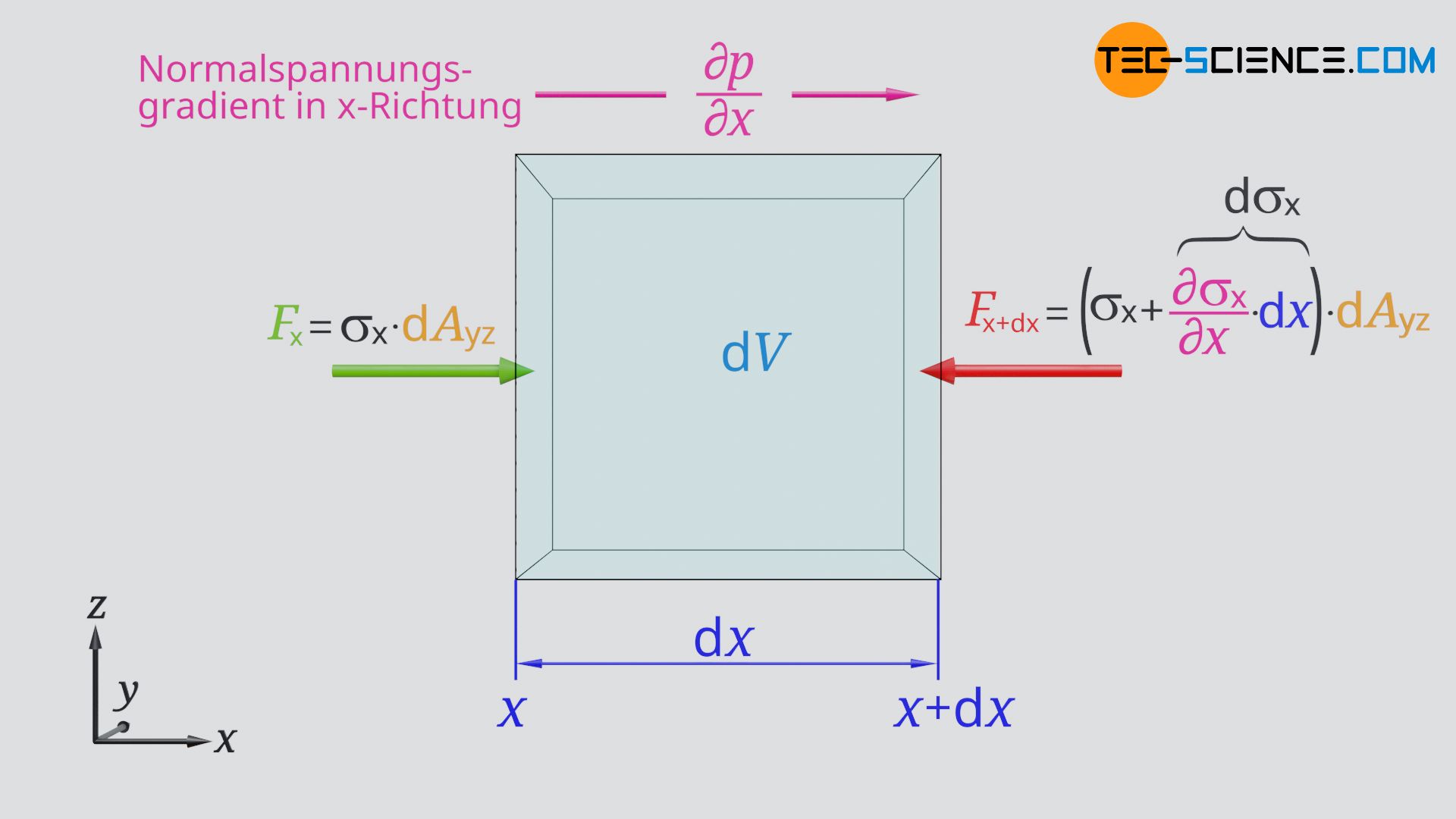
Die auf die vordere und hintere Fläche wirkenden Normalspannungen sind dabei allerdings unterschiedlich, da bspw. der Druck in Strömungsrichtung in der Regel abnimmt. Es ist also an einer betrachteten Stelle x ein Druckgradient und somit ein Spannungsgradient ∂σx/∂x vorhanden. Wirkt an der Stelle x die Normalspannung σx, dann ändert sich diese entlang der Strecke dx um ∂σx/∂x⋅dx. Folgende druckbedingte Normalkräfte wirken somit an der Stelle x bzw. x+dx auf das Volumenelement:
\begin{align}
& \underline{F_\text{x} = \sigma_\text{x} \cdot \text{d}A_\text{yz}} ~~~~~\text{Normalkraft an der Stelle }x\\[5px]
& \underline{F_\text{x+dx} = \left(\sigma_\text{x} + \frac{\partial \sigma_\text{x}}{\partial x}\text{d}x\right) \text{d}A_\text{yz}} ~~~~~\text{Normalkraft an der Stelle }x+\text{d}x \\[5px]
\end{align}
Da diese Kräfte offensichtlich in unterschiedliche Richtungen wirken, ergibt sich die resultierende Normalkraft Fσx auf das Volumenelement aus der Differenz beider Kräfte:
\begin{align}
\require{cancel}
& F_{\sigma_\text{x}} = F_\text{x} – F_\text{x+dx} \\[5px]
& F_{\sigma_\text{x}} = \sigma_\text{x} \cdot \text{d}A_\text{yz} – \left(\sigma_\text{x}+ \frac{\partial \sigma_\text{x}}{\partial x}\cdot \text{d}x\right) \cdot \text{d}A_\text{yz}\\[5px]
& F_{\sigma_\text{x}} = \cancel{\sigma_\text{x} \cdot \text{d}A_\text{yz}} – \cancel{\sigma_\text{x} \cdot \text{d}A_\text{yz}} – \frac{\partial \sigma_\text{x}}{\partial x} \cdot \underbrace{\text{d}x \cdot \text{d}A_\text{yz}}_{\text{d}V} \\[5px]
& \boxed{F_{\sigma_\text{x}} = ~ – \frac{\partial \sigma_\text{x}}{\partial x} \cdot \text{d}V} ~~\text{resultierende Normalkraft in x-Richtung} \\[5px]
\end{align}
Scherkräfte auf ein Volumenelement
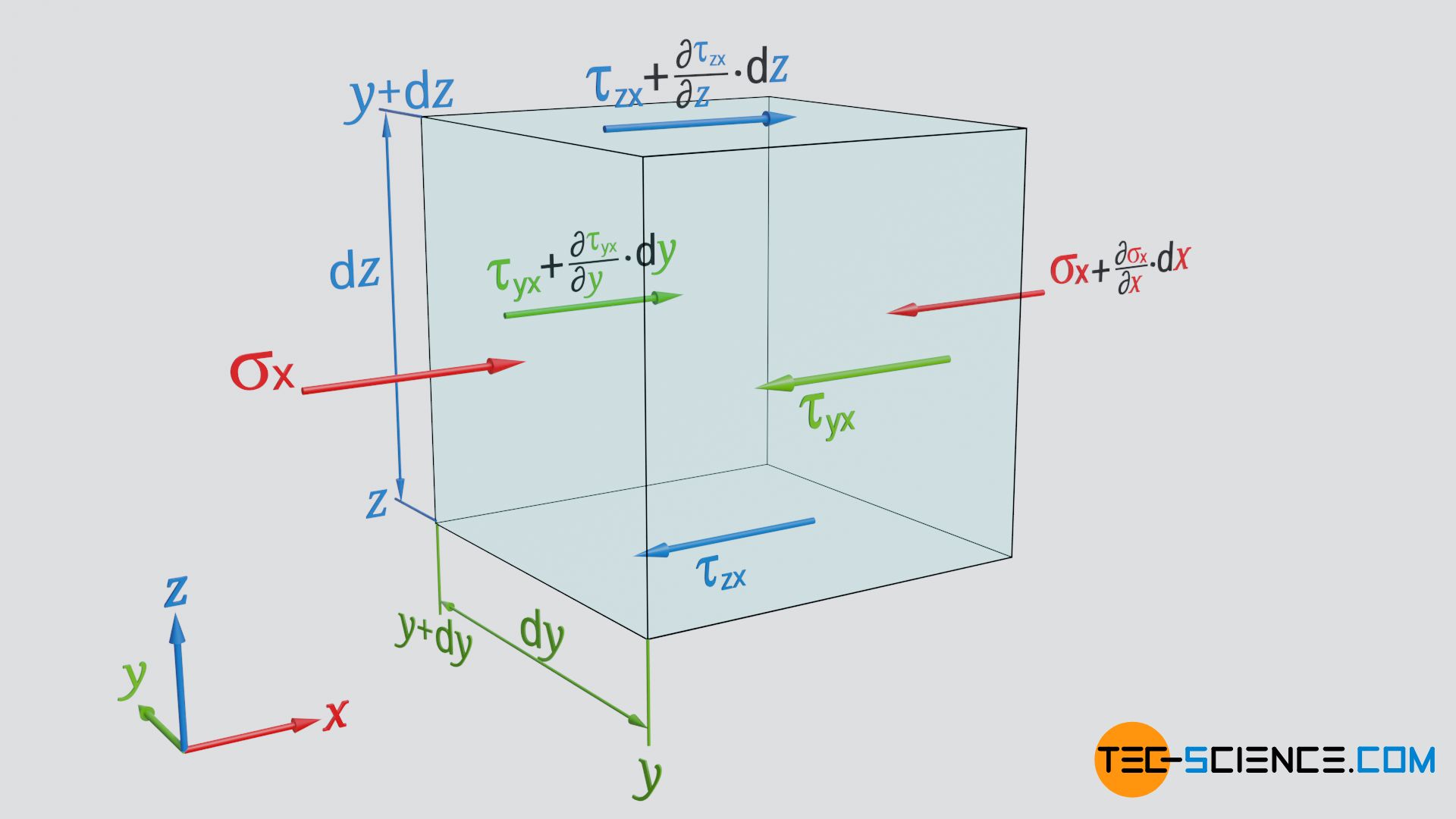
Aufgrund der Viskosität η wirken auf die seitlichen Flächen des Fluidelements und auf die Fläche oben und unten Schubkräfte (Scherkräfte) bzw. Schubspannungen in x-Richtung. Im Gegensatz zu den zuvor betrachteten Normalspannungen, die senkrecht zur Fläche gerichtet sind, wirken die Scherspannungen parallel zur Fläche.
Die Schubspannungen τij ermitteln sich gemäß des Newtonschen Reibungsgesetztes anhand des vorhandenen Geschwindigkeitsgradiente ∂vj/∂i (auch Schergeschwindigkeit genannt); zur Anwendbarkeit dieses Gesetztes innerhalb eines Kontinuums später mehr:
\begin{align}
\label{newton}
& \boxed{\tau_\text{ij} = \eta \cdot \frac{\partial v_\text{j}}{\partial i}} ~~~\text{Newtonsches Reibungsgesetz}\\[5px]
\end{align}
Darin bezeichnet i (=y,z) die Richtung der Flächennormalen für die die Schubspannung ermittelt wird und j (=x) die Richtung in der die Schubspannung τij letztlich wirkt. Auf diese Weise ergibt sich für die seitliche Fläche an der Position y die Bezeichnung τyx:
\begin{align}
&\underline{\tau_\text{yx}}~~~~~\text{Schubspannung an der Stelle }y \\[5px]
\end{align}
Über die Breite dy des Fluidelementes hinweg wird sich der Geschwindigkeitsgradient ∂vx/∂y im Allgemeinen ändern. Somit wirkt an der Stelle y+dy eine andere Schubspannung. Man kann an dieser Stelle einen entsprechenden Schubspannungsgradienten ∂τyx/∂y definieren, sodass sich dann über die Länge dy folgende Schubspannung ergibt:
\begin{align}
&\underline{\tau_\text{yx}+\frac{\partial \tau_\text{yx}}{\partial y}\text{d}y}~~~~~\text{Schubspannung an der Stelle }y+\text{d}y \\[5px]
\end{align}
Konkret bedeutet ein positiver Schubspannungsgradient, dass gemäß dem Newtonschen Reibungsgesetz der Geschwindigkeitsgradient in y-Richtung ansteigt. Die Strömungsgeschwindigkeit an der Stelle y+dy ist somit größer als an der Stelle y. In Strömungsrichtung betrachtet (positive x-Richtung), strömt das Fluid rechts des Fluidelementes also langsamer vorbei und links davon schneller.
Das Fluidelement wird auf der rechten Seite sozusagen abgebremst und auf der linken Seite von der Strömung mitgerissen, d.h. beschleunigt. Die Schubspannung an der Stelle y ist somit in negative x-Richtung gerichtet und an der Stelle y+dy in positive Richtung. Die resultierende Schubspannung der beiden seitlichen Flächen ergibt sich folglich aus der Differenz beider Scherspannungen:
\begin{align}
&\tau_\text{yx,res} = \underbrace{\tau_\text{yx}+\frac{\partial \tau_\text{yx}}{\partial y}\cdot \text{d}y}_{\text{Schubspannung an der Stelle }y+\text{d}y} – \underbrace{\tau_\text{yx}}_{\text{Schubspannung an der Stelle }y} \\[5px]
&\underline{\tau_\text{yx,res}=\frac{\partial \tau_\text{yx}}{\partial y}\cdot \text{d}y}~~~~~\text{resultierende Schubspannung auf das Fluidelement} \\[5px]
\end{align}
Diese Schubspannung (Kraft pro Flächeneinheit) multipliziert mit der Fläche dAxz ergibt schließlich die resultierende Kraft Fτyx, die auf die seitliche Flächen des Fluidelementes wirken:
\begin{align}
&F_{\tau_\text{yx}}= \tau_\text{yx,res} \cdot \text{d}A_\text{xz}\\[5px]
&F_{\tau_\text{yx}}=\frac{\partial \tau_\text{yx}}{\partial y}\cdot \underbrace{\text{d}y \cdot \text{d}A_\text{xz}}_{\text{d}V}\\[5px]
\label{for}
&\boxed{F_{\tau_\text{yx}} =\frac{\partial \tau_\text{yx}}{\partial y}\cdot \text{d}V} \\[5px]
\end{align}
Für die resultierende Schubspannung bzw. die resultierende Schubkraft Fτzx auf die obere und untere Fläche des Fluidelements gilt ganz analog:
\begin{align}
&\boxed{F_{\tau_\text{zx}} =\frac{\partial \tau_\text{zx}}{\partial z}\cdot \text{d}V} \\[5px]
\end{align}
Gewichtskraft auf ein Fluidelement
Als weitere Kraft neben Normal- und Scherkräften wirkt im Allgemeinen die Gravitation auf ein Fluidelement. Die betrachtete Strömung in x-Richtung muss dabei nicht notwendigerweise horizontal gerichtet sein, sondern kann in einem beliebigen Winkel verlaufen. In diesen Fällen ist nur diejenige Komponente der Gewichtskraft Fgx relevant, die auch in x-Richtung weist gx bezeichnet darin die Komponente der Fallbeschleunigung in x-Richtung):
\begin{align}
&F_{\text{g}_\text{x}} = \text{d}m \cdot g_\text{x} \\[5px]
&\boxed{F_{\text{g}_\text{x}} = \rho g_\text{x} \cdot \text{d}V } ~~~\text{Gewichtskraft auf das Fluidelement in x-Richtung} \\[5px]
\end{align}
Im Gegensatz zu den Normal- oder Scherkräften, greift die Gewichtskraft nicht an Flächen an, sondern am gesamten Volumen des Fluidelements. Die Gewichtskraft zählt deshalb zu den sogenannten Volumenkräften. Auch andere angreifende Feldkräfte wie elektrische oder magnetische Kräfte zählen zu den Volumenkräften. Auch diese können am Fluidelement angreifen und müssen denn entsprechend berücksichtigt werden. An dieser Stelle soll die Gewichtskraft somit nur exemplarisch für auch andere Feldkräfte stehen.
Substantielle, lokale und konvektive Beschleunigung
Die Summe aus Normalkraft Fσx, Scherkraft Fτyx und Fτzx sowie der Volumenkraft Fgx, ergibt schließlich die insgesamt auf das Fluidelement wirkende resultierende Kraft Fxres in x-Richtung:
\begin{align}
&F_{\text{x}_\text{res}} = F_{\sigma_\text{x}} + F_{\tau_\text{yx}} + F_{\tau_\text{zx}} + F_{\text{g}_\text{x}} \\[5px]
&F_{\text{x}_\text{res}} =
– \frac{\partial \sigma_\text{x}}{\partial x} \cdot \text{d}V
+ \frac{\partial \tau_\text{yx}}{\partial y} \cdot \text{d}V
+ \frac{\partial \tau_\text{zx}}{\partial z} \cdot \text{d}V
+ \rho g_\text{x} \cdot \text{d}V
\\[5px]
\end{align}
Gemäß des zweiten Newtonschen Axioms führt diese resultierende Kraft zur folgender Beschleunigung ax in x-Richtung, wobei dm=ϱ⋅dV die Masse des Fluidelements bezeichnet:
\begin{align}
\require{cancel}
&a_\text{x} = \frac{F_{\text{x}_\text{res}}}{\text{d}m} = \frac{F_{\text{x}_\text{res}}}{\rho~ \text{d}V} \\[5px]
&a_\text{x} =
\frac{- \frac{\partial \sigma_\text{x}}{\partial x} \cdot \cancel{\text{d}V}
+ \frac{\partial \tau_\text{yx}}{\partial y} \cancel{\text{d}V}
+ \frac{\partial \tau_\text{zx}}{\partial z} \cancel{\text{d}V}
+ \rho g_\text{x} \cdot \cancel{\text{d}V}}{\rho~ \cancel{\text{d}V}}
\\[5px]
&a_\text{x} =
\frac{- \frac{\partial \sigma_\text{x}}{\partial x}
+ \frac{\partial \tau_\text{yx}}{\partial y}
+ \frac{\partial \tau_\text{zx}}{\partial z}
+ \rho g_\text{x}}{\rho}
\\[5px]
\end{align}
und somit folgt:
\begin{align}
\label{a}
&\underline{a_\text{x}~ \rho=
– \frac{\partial \sigma_\text{x}}{\partial x}
+ \frac{\partial \tau_\text{yx}}{\partial y}
+ \frac{\partial \tau_\text{zx}}{\partial z}
+ \rho g_\text{x} }
\\[5px]
\end{align}
Die auch als substantielle Beschleunigung ax bezeichnete Geschwindigkeitsänderung des Fluidelements in x-Richtung lässt sich zum einen durch die zeitliche Änderung der Geschwindigkeit an einem festen Ort ausdrücken (lokale Beschleunigung: ∂vx/∂t) und zum anderen durch die Geschwindigkeitsänderung aufgrund der örtlichen Änderung des Fluidelements (konvektive Beschleunigung: ∂vx/∂x⋅vx + ∂vx/∂y⋅vy + ∂vx/∂z⋅vz):
\begin{align}
\label{sub}
&\underbrace{~~a_\text{x}~~}_{\text{substantielle}\\\text{Beschleunigung}} = \underbrace{\frac{\partial v_\text{x}}{\partial t}}_{\text{lokale}\\\text{Beschleunigung}} + \underbrace{\frac{\partial v_\text{x}}{\partial x}v_\text{x} + \frac{\partial v_\text{x}}{\partial y}v_\text{y} + \frac{\partial v_\text{x}}{\partial z}v_\text{z}}_\text{konvektive Beschleunigung} \\[5px]
\end{align}
Dieser Zusammenhang zwischen substantieller, lokaler und konvektiver Beschleunigung ist im Artikel Herleitung der Euler-Gleichung ausführlich hergeleitet und soll an dieser Stelle nicht weiter erläutert werden. Wird die Gleichung für die substantielle Beschleunigung (\ref{sub}) in Gleichung (\ref{a}) eingesetzt, dann folgt:
\begin{align}
\label{nav}
&\boxed{\left(\frac{\partial v_\text{x}}{\partial t} + \frac{\partial v_\text{x}}{\partial x}v_\text{x} + \frac{\partial v_\text{x}}{\partial y}v_\text{y} + \frac{\partial v_\text{x}}{\partial z}v_\text{z}\right) ~ \rho=- \frac{\partial \sigma_\text{x}}{\partial x} + \frac{\partial \tau_\text{yx}}{\partial y} + \frac{\partial \tau_\text{zx}}{\partial z} + \rho g_\text{x}} \\[5px]
\end{align}
Viskose Spannungstensor
Bei dreidimensionalen Strömung ändert sich die Geschwindigkeit bzw. der Geschwindigkeitsgradient in alle drei Richtungen. Dabei ist die entstehende Schubspannung aufgrund der Viskosität nicht mehr nur auf den Geschwindigkeitsgradient in einer bestimmten Richtung zurückzuführen, sondern noch auf einen Geschwindigkeitsgradienten senkrecht dazu.
Man diese Situation analog zur Deformation eines Fluidelementes betrachten. Man stelle sich hierzu Schubkräfte vor, die das Fluidelement verformen. Es entstehen auf diese Weise schräge Flächen, sodass die in der Fläche wirkenden Schubkräfte nun plötzlich eine weitere Raumdimension beeinflussen. Tatsächlich sind bei Fluiden die in zusätzliche Raumrichtungen wirkenden Spannungen nicht auf eine tatsächliche Deformation zurückzuführen (Stärke der Scherung), sondern auf die Scherrate (Geschwindigkeit der Scherung).
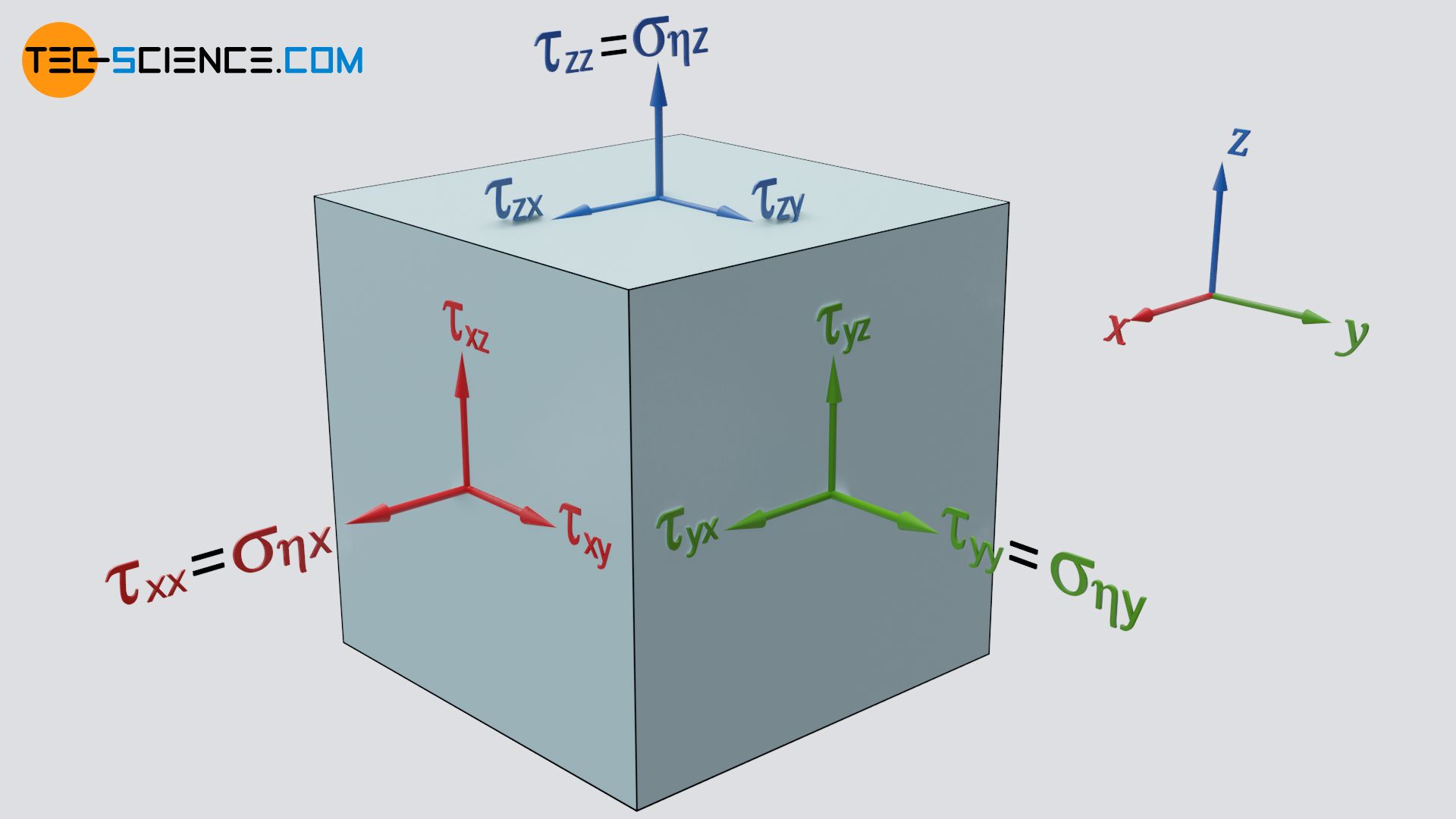
Diese Erkenntnis führt zur Einführung eines viskosen Spannungstensors, der die auf ein Fluidelement wirkenden Spannungen (Normal- und Schubspannungen) beschreibt:
\begin{align}
\label{matr1}
& \boxed{\tau =
\begin{pmatrix}
\color{red}{\tau_\text{xx}} & \tau_\text{xy} & \tau_\text{xz}
\\\
\tau_\text{yx} & \color{red}{\tau_\text{yy}} & \tau_\text{yz}
\\\
\tau_\text{zx} & \tau_\text{zy} & \color{red}{\tau_\text{zz}}
\end{pmatrix}} ~~~\text{viskoser Spannungstensor}\\[5px]
\end{align}
Für ein isotropes Newton’sches Fluid können die einzelnen Komponenten des viskosen Spannungstensors τ wie folgt anhand der Viskosität η ermittelt werden:
\begin{align}
\label{matr2}
& \boxed{\large\tau = \eta \cdot
\begin{pmatrix}
&\color{red}{\left(\frac{\partial v_\text{x}}{\partial x} + \frac{\partial v_\text{x}}{\partial x}\right)}
& \left(\frac{\partial v_\text{x}}{\partial y} + \frac{\partial v_\text{y}}{\partial x}\right)
& \left(\frac{\partial v_\text{x}}{\partial z} + \frac{\partial v_\text{z}}{\partial x}\right)
\\\
& \left(\frac{\partial v_\text{y}}{\partial x} + \frac{\partial v_\text{x}}{\partial y}\right)
&\color{red}{\left(\frac{\partial v_\text{y}}{\partial y} + \frac{\partial v_\text{y}}{\partial y}\right)}
& \left(\frac{\partial v_\text{y}}{\partial z} + \frac{\partial v_\text{z}}{\partial y}\right)
\\\
& \left(\frac{\partial v_\text{z}}{\partial x} + \frac{\partial v_\text{x}}{\partial z}\right)
& \left(\frac{\partial v_\text{z}}{\partial y} + \frac{\partial v_\text{y}}{\partial z}\right)
&\color{red}{\left(\frac{\partial v_\text{z}}{\partial z} + \frac{\partial v_\text{z}}{\partial z}\right)}
\end{pmatrix}} \\[5px]
\end{align}
Die einzelnen Einträge des Spannungstensors können auch wie folgt ermittelt werden:
\begin{align}
\label{t}
&\boxed{\tau_\text{ij} = \eta \left(\frac{\partial v_\text{i}}{\partial j} + \frac{\partial v_\text{j}}{\partial i}\right)} ~~~\text{viskose Spannung}\\[5px]
\end{align}
Es zeigt sich an dieser Stelle nun der Unterschied zum Newton’schen Reibungsansatz nach Gleichung (\ref{newton}): Bei dreidimensionalen Strömungen eines Kontinuums (Kontinuumsmechanik) hängen die Schubspannung jeweils noch von einem weiteren Geschwindigkeitsgradienten ab. Diese Erkenntnis und die Einführung des viskosen Spannungstensors ist im Wesentlichen die Leistung von Stokes.
Für die in Gleichung (\ref{nav}) enthaltenen Schubspannungen τyx und τzx gilt nach Gleichung (\ref{t}):
\begin{align}
\label{tyx}
&\underline{\tau_\text{yx} = \eta \left(\frac{\partial v_\text{y}}{\partial x} + \frac{\partial v_\text{x}}{\partial y}\right)}\\[5px]
\label{tzx}
&\underline{\tau_\text{zx} = \eta \left(\frac{\partial v_\text{z}}{\partial x} + \frac{\partial v_\text{x}}{\partial z}\right)}\\[5px]
\end{align}
Berücksichtigung der viskosen Normalspannung
Bei den angegebenen Spannungen mit identischen Indizes in Gleichung (\ref{matr1}) bzw. (\ref{matr2}) (rot markiert), zeigen offensichtlich sowohl die Flächennormale als auch die Wirkrichtung der Kraft in dieselbe Richtung. Es handelt sich dabei also nicht um Schubspannungen, sondern um Normalspannungen, die der besseren Unterscheidung deshalb häufig mit σ bezeichnet werden:
\begin{align}
& \tau_\text{xx} = \sigma_{\eta~\text{x}} \\[5px]
& \tau_\text{yy} = \sigma_{\eta~\text{y}} \\[5px]
& \tau_\text{zz} = \sigma_{\eta~\text{z}} \\[5px]
\end{align}
Dies bedeutet aber offensichtlich auch, dass die Viskosität nicht nur Schubspannungen, sondern auch Normalspannungen erzeugt. Diese aus der Viskosität resultierenden Normalspannungen sind deshalb zusätzlich mit dem Formelzeichen für die Viskosität η bezeichnet. Für die in x-Richtung wirkende viskositätsbedingte Normalspannung σηx gilt nach Gleichung (\ref{t}):
\begin{align}
& \tau_\text{xx} =\underline{\sigma_{\eta~\text{x}}}= \eta \left(\frac{\partial v_\text{x}}{\partial x} + \frac{\partial v_\text{x}}{\partial x}\right) = \underline{2\eta \frac{\partial v_\text{x}}{\partial x}} \\[5px]
\end{align}
Diese viskose Normalspannung wirkt als Normalkraft zusätzlich zum (statischen) Druck in x-Richtung auf das Fluidelement. Im Gegensatz zum statischen Druck, der entgegen der Flächennormalen des Fluidelements wirkt (sozusagen auf das Fluidelement gerichtet ist), wirkt die viskose Normalspannung jedoch in Richtung der Flächennormalen (d.h. weg vom Fluidelement). Die in x-Richtung insgesamt auf das Fluidelement wirkende Normalspannung σx ergibt sich somit aus dem statischen Druck p, abzüglich der viskosen Normalspannung σηx:
\begin{align}
& \sigma_\text{x} = p~ – \sigma_{\eta~\text{x}} \\[5px]
\label{sx}
& \underline{\sigma_\text{x} = p~ – 2\eta \frac{\partial v_\text{x}}{\partial x}} \\[5px]
\end{align}
Die Navier-Stokes-Gleichung für inkompressible Fluide
Werden die Gleichungen (\ref{tyx}), (\ref{tzx}) und (\ref{sx}) schließlich in die rechte Seite von Gleichung (\ref{nav}) eingesetzt, dann ergibt sich die nachfolgend angegebene Gleichung (der Übersichtlichkeit halber ist nur die rechte Seite der Gleichung dargestellt):
\begin{align}
&…=- \frac{\partial \sigma_\text{x}}{\partial x} + \frac{\partial \tau_\text{yx}}{\partial y} + \frac{\partial \tau_\text{zx}}{\partial z} + \rho g_\text{x} \\[5px]
&…=- \frac{\partial}{\partial x}\left(p~ – 2\eta \frac{\partial v_\text{x}}{\partial x}\right) +\eta ~\frac{\partial}{\partial y} \left(\frac{\partial v_\text{y}}{\partial x} + \frac{\partial v_\text{x}}{\partial y}\right) + \eta ~\frac{\partial}{\partial z} \left(\frac{\partial v_\text{z}}{\partial x} + \frac{\partial v_\text{x}}{\partial z}\right)+ \rho g_\text{x} \\[5px]
&…=- \frac{\partial p}{\partial x} + \color{red}{ 2\eta \frac{\partial^2 v_\text{x}}{\partial x^2}} +\eta \frac{\partial}{\partial y} \left(\frac{\partial v_\text{y}}{\partial x}\right) + \eta \frac{\partial^2 v_\text{x}}{\partial y^2}+ \eta \frac{\partial}{\partial z} \left(\frac{\partial v_\text{z}}{\partial x} \right)+ \eta \frac{\partial^2 v_\text{x}}{\partial z^2}+ \rho g_\text{x} \\[5px]
\end{align}
Den rot markierten Term können wir auch etwas anders schreiben und erhalten damit:
\begin{align}
…=&- \frac{\partial p}{\partial x} + \color{red}{\eta \frac{\partial^2 v_\text{x}}{\partial x^2} +\eta \frac{\partial}{\partial x} \left(\frac{\partial v_\text{x}}{\partial x}\right)} +\eta \frac{\partial}{\partial y} \left(\frac{\partial v_\text{y}}{\partial x}\right) + \eta \frac{\partial^2 v_\text{x}}{\partial y^2} \\[5px]&
+ \eta \frac{\partial}{\partial z} \left(\frac{\partial v_\text{z}}{\partial x} \right) + \eta \frac{\partial^2 v_\text{x}}{\partial z^2}+ \rho g_\text{x} \\[5px]
\end{align}
Wir ordnen diese Gleichung nun etwas:
\begin{align}
…=&- \frac{\partial p}{\partial x}
+ \eta \left(\frac{\partial^2 v_\text{x}}{\partial x^2}
+ \frac{\partial^2 v_\text{x}}{\partial y^2}
+ \frac{\partial^2 v_\text{x}}{\partial z^2}\right)\\[5px]&
+ \eta \frac{\partial}{\color{red}{\partial x}} \left(\frac{\partial v_\text{x}}{\color{blue}{\partial x}}\right)
+ \eta \frac{\partial}{\color{red}{\partial y}} \left(\frac{\partial v_\text{y}}{\color{blue}{\partial x}}\right)
+ \eta \frac{\partial}{\color{red}{\partial z}} \left(\frac{\partial v_\text{z}}{\color{blue}{\partial x}} \right)
+ \rho g_\text{x} \\[5px]
\end{align}
Wir können die Koordinaten nach denen wir die partielle Ableitung in den einzelnen Termen bilden auch vertauschen, denn schließlich macht es keinen Unterschied, ob wir zuerst partiell nach y ableiten und anschließend nach x oder erst nach x und anschließend nach y. Wir tauschen also die rot markierten Operatoren außerhalb der Klammer mit den blau markierten Operatoren innerhalb der Klammer:
\begin{align}
…=&- \frac{\partial p}{\partial x}
+ \eta \left(\frac{\partial^2 v_\text{x}}{\partial x^2}
+ \frac{\partial^2 v_\text{x}}{\partial y^2}
+ \frac{\partial^2 v_\text{x}}{\partial z^2}\right)\\[5px]&
+ \eta \frac{\partial}{\color{red}{\partial x}} \left(\frac{\partial v_\text{x}}{\color{blue}{\partial x}}\right)
+ \eta \frac{\partial}{\color{red}{\partial x}} \left(\frac{\partial v_\text{y}}{\color{blue}{\partial y}}\right)
+ \eta \frac{\partial}{\color{red}{\partial x}} \left(\frac{\partial v_\text{z}}{\color{blue}{\partial z}} \right)
+ \rho g_\text{x} \\[5px]
\end{align}
Wir klammern nun den Operator mit dem wir partiell nach x ableiten aus und erhalten:
\begin{align}
…=&- \frac{\partial p}{\partial x}
+ \eta \left(\frac{\partial^2 v_\text{x}}{\partial x^2}
+ \frac{\partial^2 v_\text{x}}{\partial y^2}
+ \frac{\partial^2 v_\text{x}}{\partial z^2}\right)
+ \eta \frac{\partial}{\partial x}
\color{red}{\underbrace{\left(
\frac{\partial v_\text{x}}{\partial x}
+\frac{\partial v_\text{y}}{\partial y}
+\frac{\partial v_\text{z}}{\partial z}
\right)}_{=0}}
+ \rho g_\text{x} \\[5px]
\end{align}
Der rot markierte Term ist für ein inkompressibles Fluid aufgrund der Kontinuitätsgleichung null (dies gilt in sehr guter Näherung auf für Gase bei nicht all zu großen Strömungsgeschwindigkeiten)! Diese Vereinfachung führt schließlich zur folgenden Gesamtgleichung, die die Bewegung eines in inkompressiblen Fluids als Kontinuum in x-Richtung beschreibt:
\begin{align}
&\left(\frac{\partial v_\text{x}}{\partial t}+ \frac{\partial v_\text{x}}{\partial x}v_\text{x} + \frac{\partial v_\text{x}}{\partial y}v_\text{y} + \frac{\partial v_\text{x}}{\partial z}v_\text{z}\right) \rho
=
– \frac{\partial p}{\partial x}
+ \eta \left(\frac{\partial^2 v_\text{x}}{\partial x^2}
+ \frac{\partial^2 v_\text{x}}{\partial y^2}
+ \frac{\partial^2 v_\text{x}}{\partial z^2}\right)
+ \rho g_\text{x}
\\[5px]
\end{align}
Für die Bewegung in y- und z-Richtung gelten die analogen Gleichungen. Diese Gleichungen werden schließlich als Navier-Stokes-Gleichungen bezeichnet:
\begin{align}
&\boxed{\left(\frac{\partial \color{red}{v_\text{x}}}{\partial t}
+ \frac{\partial \color{red}{v_\text{x}}}{\partial x}v_\text{x}
+ \frac{\partial \color{red}{v_\text{x}}}{\partial y}v_\text{y}
+ \frac{\partial \color{red}{v_\text{x}}}{\partial z}v_\text{z}
\right) \rho
=
– \frac{\partial p}{\partial \color{red}{x}}
+ \eta \left(\frac{\partial^2 \color{red}{v_\text{x}}}{\partial x^2}
+ \frac{\partial^2 \color{red}{v_\text{x}}}{\partial y^2}
+ \frac{\partial^2 \color{red}{v_\text{x}}}{\partial z^2}\right)
+ \rho \color{red}{g_\text{x}}}
\\[5px]
&\boxed{\left(\frac{\partial \color{green}{v_\text{y}}}{\partial t}
+ \frac{\partial \color{green}{v_\text{y}}}{\partial x}v_\text{x}
+ \frac{\partial \color{green}{v_\text{y}}}{\partial y}v_\text{y}
+ \frac{\partial \color{green}{v_\text{y}}}{\partial z}v_\text{z}
\right) \rho
=
– \frac{\partial p}{\partial \color{green}{y}}
+ \eta \left(\frac{\partial^2 \color{green}{v_\text{y}}}{\partial x^2}
+ \frac{\partial^2 \color{green}{v_\text{y}}}{\partial y^2}
+ \frac{\partial^2 \color{green}{v_\text{y}}}{\partial z^2}\right)
+ \rho \color{green}{g_\text{y}}}
\\[5px]
&\boxed{\left(\frac{\partial \color{blue}{v_\text{z}}}{\partial t}
+ \frac{\partial \color{blue}{v_\text{z}}}{\partial x}v_\text{x}
+ \frac{\partial \color{blue}{v_\text{z}}}{\partial y}v_\text{y}
+ \text{ }\frac{\partial \color{blue}{v_\text{z}}}{\partial z}v_\text{z}
\right) \rho
=
– \frac{\partial p}{\partial \color{blue}{z}}
+ \eta \left(\frac{\partial^2 \color{blue}{v_\text{z}}}{\partial x^2}
+ \text{ }\frac{\partial^2 \color{blue}{v_\text{z}}}{\partial y^2}
+ \text{ }\frac{\partial^2 \color{blue}{v_\text{z}}}{\partial z^2}\right)
+ \rho \color{blue}{g_\text{z}}}
\\[5px]
\end{align}
In vektorieller Schreibweise stellt sich die Navier-Stokes-Gleichung wie folgt dar:
\begin{align}
&\boxed{ \left[\frac{\partial \vec v}{\partial t} + \left(\vec v \cdot \vec \nabla \right) \vec v \right] \rho = – \vec \nabla p+ \eta \left( \vec \nabla^2 \vec v \right) + \rho \vec g}~~~\text{Navier-Stokes-Gleichung} \\[5px]
&\underbrace{\left[\underbrace{\frac{\partial \vec v}{\partial t}}_\text{lokale Beschl.} + \underbrace{\left(\vec v \cdot \vec \nabla \right) \vec v}_\text{konvektive Beschl.} \right]}_\text{(substantielle) Beschleunigung} \rho = \underbrace{- \vec \nabla p}_{\text{„Druckkraft“}\\\text{(Normalkraft)}}+ \underbrace{\eta \left( \vec \nabla^2 \vec v \right)}_{\text{„Reibungskraft“}\\\text{(Scherkraft)}} + \underbrace{\rho \vec g}_{\text{„Gewichtskraft“}\\\text{(Volumenkraft)}} \\[5px]
\end{align}
Beachte, dass die hier dargestellte Form der Navier-Stokes-Gleichung nur für inkompressible Fluide gilt und näherungsweise auch für relativ langsam strömende Gase!
Die Navier-Stokes-Gleichungen können im Allgemeinen nicht analytisch gelöst werden. Nur für spezielle Fälle kann unter vereinfachten Annahmen eine Lösung bzw. Näherungslösung gefunden werden. Unter anderem ergibt sich als Spezialfall von inkompressiblen Fluide in einer Rohrströmung das Gesetz von Hagen-Poiseuille. Für Fluide, bei denen die Viskosität vernachlässigt werden kann, gilt η=0 und man erhält als Spezialfall schließlich die Euler-Gleichung für reibungsfreie Strömungen:
\begin{align}
& \left[\frac{\partial \vec v}{\partial t} + \rho \left(\vec v \cdot \vec \nabla \right) \vec v \right] \rho = – \vec \nabla p+ \rho \vec g \\[5px]
&\boxed{\frac{\partial \vec v}{\partial t} + \left(\vec v \cdot \vec \nabla \right) \vec v + \frac{1}{\rho} \vec \nabla p = \vec g}~~~\text{Euler-Gleichung} \\[5px]
\end{align}
")

")
")

