Je nach Form der Zahnräder und Art der Verzahnung können diese in Stirnräder, Kegelräder und Schnecken bzw. Schneckenräder eingeteilt werden.
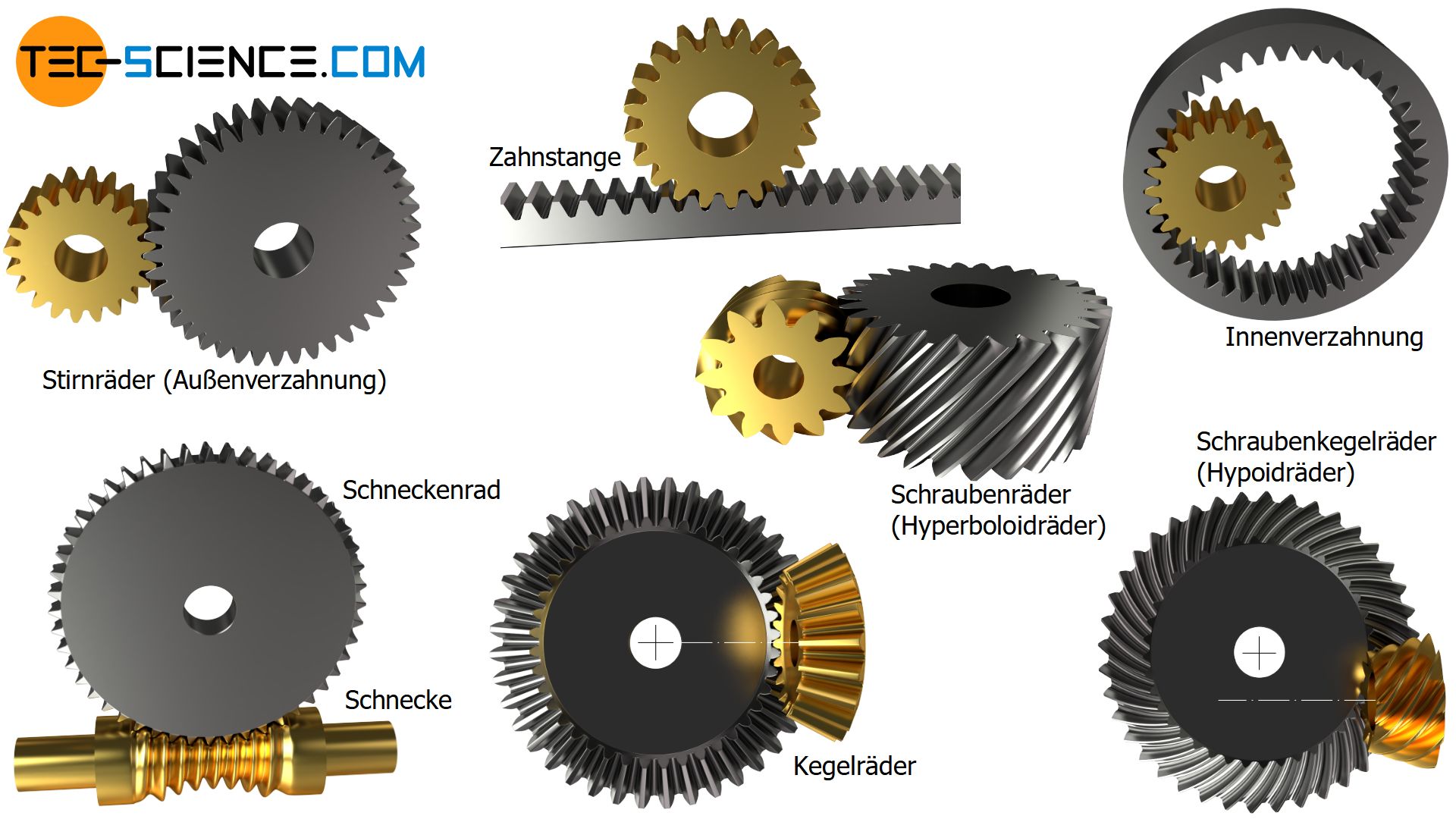
Die untere Abbildung zeigt eine Auswahl an verschiedenen Zahnradarten, wie sie im Maschinenbau verwendet werden. Eine grobe Einteilung kann wie folgt vorgenommen werden:
- Stirnräder (Stirnradgetriebe)
- Kegelräder (Kegelradgetriebe)
- Schnecke und Schneckenräder (Schneckengetriebe)
Die im Maschinenbau am häufigsten verwendete Zahnradart ist das sogenannte Stirnrad; sie sind am wirtschaftlichsten herstellbar. In dieser Variante sind die Zähne am Umfang einer zylindrischen Scheibe angeordnet (Wälzzylinder genannt). Ein Getriebe, das ausschließlich Stirnräder zur Änderung der Drehzahl bzw. des Drehmomentes nutzt wird Stirnradgetriebe genannt.
Aufgrund der am Umfang angeordneten Zähne, kann ein weiteres Stirnrad ebenfalls nur mit seinen Umfang in das Gegenzahnrad greifen. Deshalb sind bei einem reinen Stirnradgetriebe die Drehachsen der unterschiedlichen Zahnradwellen stets parallel zueinander gerichtet.
Bei Stirnräder sind die Zähne am Umfang eines zylindrischen Körpers (Wälzzylinder) angeordnet! Die Zahnradachsen eines Stirnradgetriebes verlaufen stets parallel zueinander.
Je nachdem ob sich die Kraftübertragung in einem Getriebe auf eine wälzende oder schraubenförmige Bewegung zurückführen lässt, können zwei grundsätzliche Arten von Getrieben unterschieden werden:
- Wälzgetriebe
- Schraubgetriebe
Wälzgetriebe zeichnen sich dadurch aus, dass sich die Grundformen der verwendeten Zahnräder auf Wälzkörper zurückführen lassen, die ohne Gleiten aufeinander abwälzen. Es findet am Umfang dieser Wälzkörper somit keine Relativbewegung an den kraftübertragenden Wälzflächen statt.
Bei Schraubgetrieben findet hingegen keine wälzende Bewegung statt, sondern die Kontaktflächen der Grundkörper gleiten aufeinander ab. Bei der Paarung von Schraubenräder, die als Stirnräder (Schrägstirnräder) ausgeführt sind, spricht man von Schraubenstirnrädergetriebe oder von Hyperboloidgetriebe.
Die Grundform eines Schraubenrades kann aber auch kegelförmig sein (siehe hierzu Artikel Kegelräder). Man spricht dann von Schraubenkegelräder und das Getriebe wird dementsprechend als Schraubenkegelrädergetriebe oder als Hypoidgetriebe bezeichnet werden.
Ein Sonderfall eines Schraubgetriebes ist das sogenannte Schneckengetriebe. Im Vergleich zum allgemeinen Fall eines Schraubgetriebes bietet das Schneckengetriebe einen linienförmigen Flankenkontakt und erlaubt somit das Übertragen größerer Drehmomente.
Mit Ausnahme von Schraubenrädern haben die betrachteten Stirnradvarianten den Nachteil, dass die Zahnradachsen nur parallel zueinander angeordnet werden können. In Fällen wo sich die Wellenachsen kreuzen oder gar schneiden müssen, bietet sich die Verwendung von Kegelräder an. Auf diese wird im Artikel Kegelräder näher eingegangen.
")

")


